
Marc Arsenault
Biography
Education
- 2006, Ph.D. (Mechanical Engineering)
Université Laval, Québec, Québec, Canada - 2003, M.A.Sc. (Mechanical Engineering)
Université de Moncton, Moncton, New Brunswick, Canada - 2002, B.A.Sc. (Mechanical Engineering - COOP)
Université de Moncton, Moncton, New Brunswick, Canada
Academic Appointments
- 2023 to present, Full Professor, School of Engineering and Computer Science, Laurentian University, Sudbury, Ontario, Canada
- 2013 to 2023, Associate Professor, School of Engineering and Computer Science, Laurentian University, Sudbury, Ontario, Canada
- 2010 to 2013, Associate Professor, Department of Mechanical and Aerospace Engineering, Royal Military College of Canada, Kingston, Ontario, Canada
- 2006 to 2010, Assistant Professor, Department of Mechanical and Aerospace Engineering, Royal Military College of Canada, Kingston, Ontario, Canada
Research
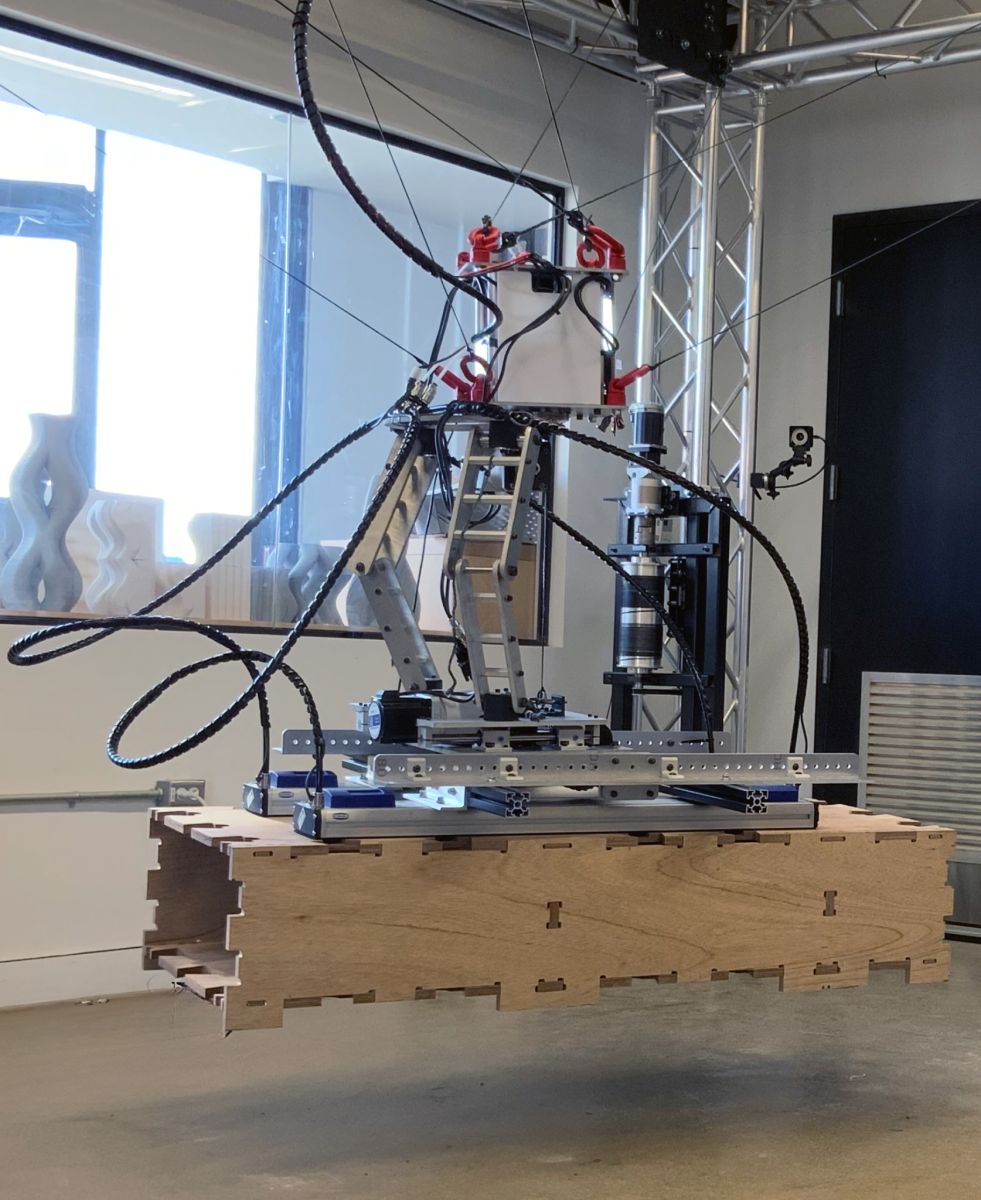
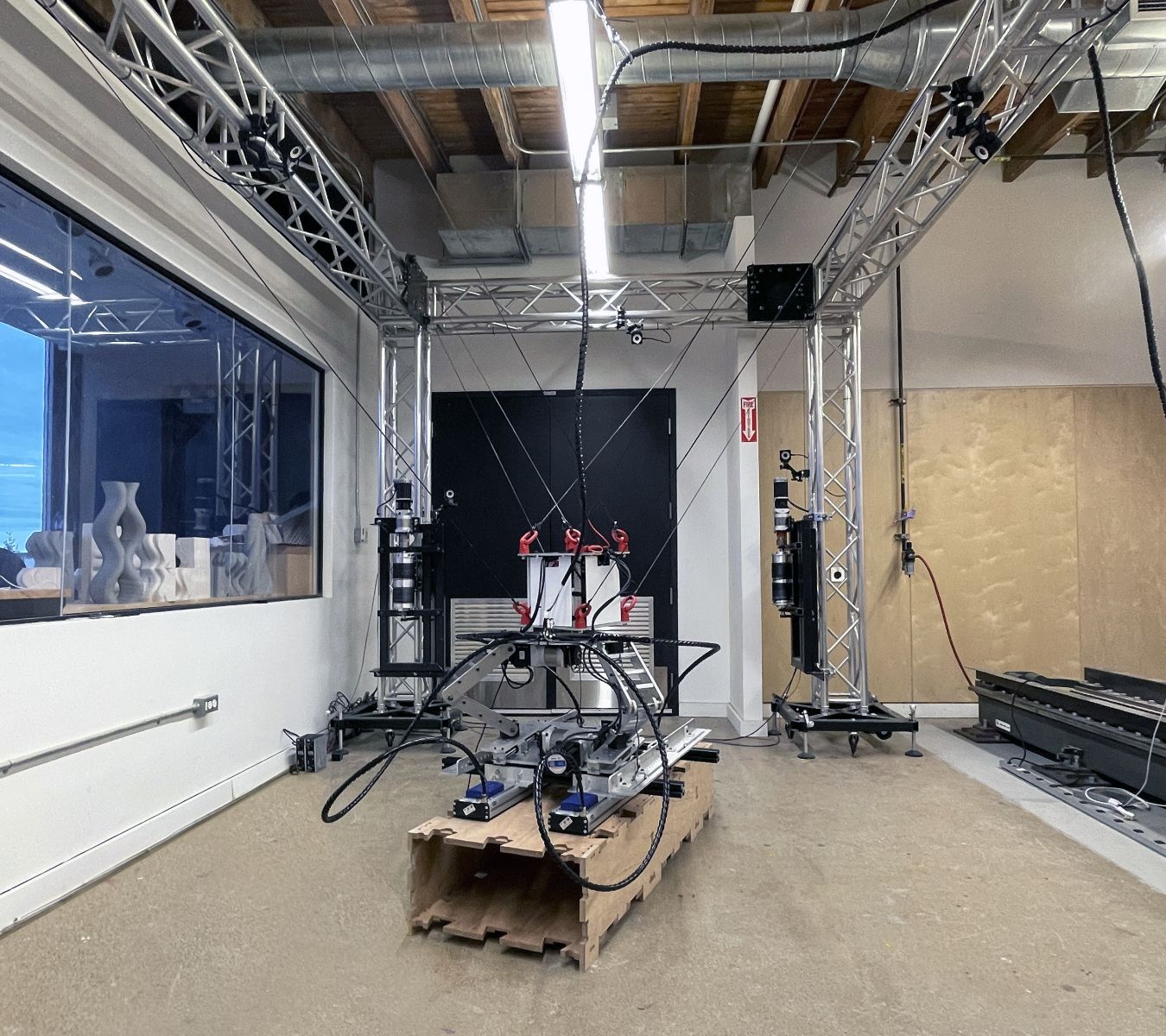
My research interests lie in the field of robot mechanics. Within this field, most recent work has been aimed at the development, analysis and synthesis of cable-based robots. The interest in this type of robot is largely motivated by the fact that cables allow for a reduction in the inertia of a robot’s moving parts thus allowing higher acceleration motions to be performed. Moreover, cable-based robots are easily scalable and often benefit from relatively large reachable workspaces. Several new robot architectures have been developed and analyzed to assess their performance on the basis of their workspace, stiffness and dynamic characteristics.
Awards
- Best reviewers award, ASME Journal of Mechanisms and Robotics, 2024.
- Award for Outstanding Contribution in Peer Review, Mechanism and Machine Theory, 2023.
- Best reviewers award, ASME Journal of Mechanisms and Robotics, 2021.
- Best paper award, Transactions of the Canadian Society for Mechanical Engineering, 2007.
Teaching
ENGR-2506: Dynamics
ENGR-3516: Vibrations and Dynamic Systems
ENGR-3546: System Modeling and Simulation
ENGR-3556: Electromechanical Actuators
ENGR-5136: Engineering Design Optimization
ENGR-5557: Advanced Robot Mechanics
Publications
Articles published in refereed journals:
- Ethan McDonald, Marc Arsenault, Steven Beites (2023). Design of a 3-DoF Cable-Driven Parallel Robot for
Automated Construction Based on Workspace and Kinematic Sensitivity. ASME Journal of Mechanisms and Robotics, https://doi.org/10.1115/1.4056709 - Marc Arsenault, Roger Boudreau, Scott Nokleby (2022). Determination of the available wrench set of a 3-RPRR kinematically-redundant planar parallel manipulator. Mechanism and Machine Theory, 169, 18 pages, https://doi.org/10.1016/j.mechmachtheory.2021.104628
- Marc Arsenault, Roger Boudreau, Scott Nokleby (2021). Computation of the Available Force Set of a 3-RPRR Kinematically-Redundant Planar Parallel Manipulator. ASME Journal of Mechanisms and Robotics, 13(6), 12 pages, https://doi.org/10.1115/1.4051062
- Katie Goggins, Delphine Chadefaux, Marco Tarabini, Marc Arsenault, W. Brent Lievers and Tammy Eger (2021). Four degree-of-freedom lumped parameter model of the foot-ankle system exposed to vertical vibration from 10 to 60 Hz with varying centre of pressure conditions. Ergonomics, https://doi.org/10.1080/00140139.2021.1891298
- Marc Arsenault (2020). Workspace-based design of equivalent compression spring legs for a 3-DoF translational tensegrity robot. ASME Journal of Mechanisms and Robotics, 12(4): 041004 (8 pages) https://doi.org/10.1115/1.4045724
- Marc Arsenault, Louis-Francis Tremblay and Meysar Zeinali (2020). Optimization of trajectory durations based on flow rate scaling for a 4-DoF semi-automated hydraulic rockbreaker. Mechanism and Machine Theory, 143, https://doi.org/10.1016/j.mechmachtheory.2019.103632
- Louis-Francis Tremblay, Marc Arsenault and Meysar Zeinali (2020). Development of a trajectory planning algorithm for a 4-DoF rockbreaker based on hydraulic flow rate limits. Transactions of the CSME, 44(4): 501-510, https://doi.org/10.1139/tcsme-2019-0173
- Marc Arsenault (2018). Design of variable radius drum mechanisms. Mechanism and Machine Theory, 129: 175-190, https://doi.org/10.1016/j.mechmachtheory.2018.07.014
- Louis-Francis Tremblay, Marc Arsenault and Meysar Zeinali (2018). Simplification of the dynamic model of a hydraulic rockbreaker for implementation in a model-based control scheme. Transactions of the CSME, 41(1): 38-48, https://doi.org/10.1139/tcsme-2017-0006
- Marc Arsenault (2013). Workspace and stiffness analysis of a three-degree-of-freedom spatial cable suspended parallel mechanism while considering cable mass. Mechanism and Machine Theory, 66: 1-13, https://doi.org/10.1016/j.mechmachtheory.2013.03.003
- Sam Chen, Marc Arsenault and Kodjo Moglo (2012). Design of a mechanism to simulate the quasi-static moment-deflection behaviour of the osteoligamentous structure of the C3-C4 cervical spine segment in the flexion-extension and lateral bending directions. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 226(11): 817-826, https://doi.org/10.1177/0954411912454105
- Sam Chen and Marc Arsenault (2012). Analytical computation of the actuator and Cartesian workspace boundaries for a planar 2-degree-of-freedom translational tensegrity mechanism. ASME Journal of Mechanisms and Robotics, 4(1): 011010-1-011010-8, https://doi.org/10.1115/1.4005335
- Chris Mohr and Marc Arsenault (2011). Kinematic analysis of a translational 3-DoF tensegrity mechanism. Transactions of the CSME, 35(4): 573-584, https://doi.org/10.1139/tcsme-2011-0035
- Marc Arsenault (2011). Stiffness analysis of a 2-DoF planar tensegrity mechanism. ASME Journal of Mechanisms and Robotics, 3(2): 021011-1-021011-8, https://doi.org/10.1115/1.4003849
- Marc Arsenault (2010). Determination of the analytical workspace boundaries of a novel 2-DoF planar tensegrity mechanism. Transactions of the CSME, 34(1): 75-91, https://doi.org/10.1139/tcsme-2010-0005
- Marc Arsenault and Clément M. Gosselin (2009). Kinematic and static analysis of a 3-PUPS spatial tensegrity mechanism. Mechanism and Machine Theory, 44(1): 162-179, https://doi.org/10.1016/j.mechmachtheory.2008.02.005
- Marc Arsenault and Clément M. Gosselin (2008). Kinematic and static analysis of a 3-DoF spatial modular tensegrity mechanism. International Journal of Robotics Research, 27(8): 951-966, https://doi.org/10.1177/0278364908091152
- Marc Arsenault and Clément M. Gosselin (2007). Static balancing of tensegrity mechanisms. ASME Journal of Mechanical Design, 129(3): 295-300, https://doi.org/10.1115/1.2406100
- Marc Arsenault and Clément M. Gosselin (2006). Kinematic, static and dynamic analysis of a spatial three-degree-of-freedom tensegrity mechanism. ASME Journal of Mechanical Design, 128(5): 1061-1069, https://doi.org/10.1115/1.2218881
- Marc Arsenault and Clément M. Gosselin (2006). Kinematic, static and dynamic analysis of a planar 2-DoF tensegrity mechanism. Mechanism and Machine Theory, 41(9): 1072-1089, https://doi.org/10.1016/j.mechmachtheory.2005.10.014
- Marc Arsenault and Roger Boudreau (2006). Synthesis of planar parallel mechanisms while considering workspace, dexterity, stiffness and singularity avoidance. ASME Journal of Mechanical Design, 128(1): 69-78, https://doi.org/10.1115/1.2121747
- Marc Arsenault and Clément M. Gosselin (2005). Dynamic simulation of a spatial 3-DoF tensegrity mechanism. Transactions of the CSME, 29(4): 491-505, https://doi.org/10.1139/tcsme-2005-0030
- Marc Arsenault and Clément M. Gosselin (2005). Kinematic, static and dynamic analysis of a planar 1-DoF tensegrity mechanism. ASME Journal of Mechanical Design, 127(6): 1152-1160, https://doi.org/10.1016/j.mechmachtheory.2005.10.014
- Marc Arsenault and Roger Boudreau (2004). The synthesis of three-degree-of-freedom parallel mechanisms with revolute joints (3-RRR) for an optimal singularity-free workspace. Journal of Robotic Systems, 21(5): 259-274, https://doi.org/10.1002/rob.20013
Articles published in refereed conference proceedings:
- Beites, S., Arsenault, M., McDonald, E. (2024) In-situ Robotic Construction: A Technological Approach to Housing Affordability. Proceedings of the ACSA 112th Annual Meeting: Disrupters on the Edge, Vancouver, BC, Canada.
- McDonald E., Beites S., Arsenault M. (2022) CDPR Studio: A Parametric Design Tool for Simulating Cable-Suspended Parallel Robots. In: Gerber D., Pantazis E., Bogosian B., Nahmad A., Miltiadis C. (eds) Computer-Aided Architectural Design. Design Imperatives: The Future is Now. CAAD Futures 2021. Communications in Computer and Information Science, vol 1465. Springer, Singapore. https://doi.org/10.1007/978-981-19-1280-1_22
- K. A. Goggins, D. Chadefaux, M. Tarabini, W. B. Lievers, M. Arsenault and T. R.
Eger. (2021). Modeling of the foot-ankle system in natural standing position using a four-degree-of-freedom
lumped parameter model. 8th American Conference on Human Vibration. - M. Arsenault (2019). Computation of the interference-free wrench feasible workspace of a 3-DoF translational tensegrity robot. Proceedings of the 15th IFToMM World Congress / Fourth International Conference on Cable-Driven Parallel Robots, Krakow, Poland.
- L.-F. Tremblay, M. Arsenault and M. Zeinali (2019). Development of a trajectory planning algorithm for a 4-DoF rockbreaker based on hydraulic flowrate limits. Proceedings of the 2019 CCToMM M3 Symposium, Montréal, QC.
- L.-F. Tremblay, M. Arsenault and M. Zeinali (2017). Simplification of the dynamic model of a hydraulic rockbreaker for the purpose of implementation in a model-based control scheme. Proceedings of the 2017 CCToMM M3 Symposium, Montréal, QC.
- C. Mohr and M. Arsenault (2016). Design and fabrication of a functional prototype for a 3-DoF translational tensegrity robot. Proceedings of the CSME International Congress, Kelowna, BC.
- Marc Arsenault (2012). Stiffness analysis of a planar 2-DoF cable-suspended mechanism while considering cable mass. Proceedings of the First International Conference on Cable-Driven Parallel Robots, Stuttgart, Germany, pp. 405-421.
- Chris Mohr and Marc Arsenault (2011). Kinematic analysis of a translational 3-DoF tensegrity mechanism. Proceedings of the 2011 CCToMM Symposium on Mechanisms, Machines, and Mechatronics (2011 CCToMM M3), Montréal, Québec, Canada.
- Sam Chen and Marc Arsenault (2010). Workspace computation and analysis of a planar 2-DoF translational tensegrity mechanism. Proceedings of the 2010 ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), Montréal, Québec, Canada.
- Marc Arsenault (2010). Optimization of the prestress stable wrench closure workspace of planar parallel three-degree-of-freedom cable-driven mechanisms with four cables. Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, USA.
- Marc Arsenault (2008). Stiffness analysis of a 2-DoF planar tensegrity mechanism. Proceedings of the 2008 ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE), New York, New York, USA.
- Marc Arsenault (2008). Kinematic analysis of a novel 2-DoF planar tensegrity mechanism. Proceedings of the 2008 CSME Forum, Ottawa, Ontario, Canada.
- Marc Arsenault and Clément M. Gosselin (2006). Kinematic and static analysis of a planar modular 2-DoF tensegrity mechanism. Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, Florida, USA.
- Marc Arsenault and Clément M. Gosselin (2005). Static balancing of tensegrity mechanisms. Proceedings of the 2005 ASME International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE 2005), Long Beach, California, USA.
- Marc Arsenault and Clément M. Gosselin (2005). Dynamic simulation of a spatial 3-DoF tensegrity mechanism. Proceedings of the 2005 CCToMM Symposium of Mechanisms, Machines, and Mechatronics (2005 CCToMM M3), Montréal, Québec, Canada.
- Marc Arsenault and Clément M. Gosselin (2004). Development and analysis of a planar 1-DoF tensegrity mechanism. Proceedings of the 2004 CSME Forum, London, Ontario, Canada.
- Marc Arsenault and Roger Boudreau (2004). The synthesis of a general planar parallel manipulator with prismatic joints for optimal stiffness. Proceedings of the 11th World Congress in Mechanism and Machine Science (IFToMM), Tianjin, China.
- Marc Arsenault and Roger Boudreau (2003). The synthesis of three-degree-of freedom planar parallel manipulators with revolute joints (3-RRR) for an optimal singularity free workspace. Proceedings of the 2003 CCToMM Symposium of Mechanisms, Machines, and Mechatronics (2003 CCToMM M3), Montréal, Québec, Canada.